类人机器人正从受控原型向实际部署系统发展,在此过程中,设计权衡将直接影响其性能和可扩展性。随着类人机器人从实验室原型转变为工业级平台,工程师必须协调相互冲突的架构需求。将高扭矩电力线路布设在紧凑的驱动器通道中,会增加热负荷,还会在频繁运动的关节中引入信号完整性风险。这些限制条件要求互连解决方案既能处理末端的大电流,又能集成高密度视觉和 LiDAR 传感器,以实现 360 度态势感知。许多平台仍然依赖手工布线和非标准化组件,这会限制可重复性,使得从单个工作原型扩展到稳定量产单元变得困难重重。
解决这些问题需要转变互连系统策略。借助高密度集成,设计人员将能够利用超紧凑的板对板和混合型方案,将电力和数据线路容纳于机器人内部的有限空间内。动态耐久性则通过高柔性电缆组件和压力锁紧接口实现,能够适应连续的多轴运动。在生产层面,自动化可扩展性用机器可适用的互连系统取代人工处理,从而缩短装配时间,并最大程度降低人为错误导致的变化。
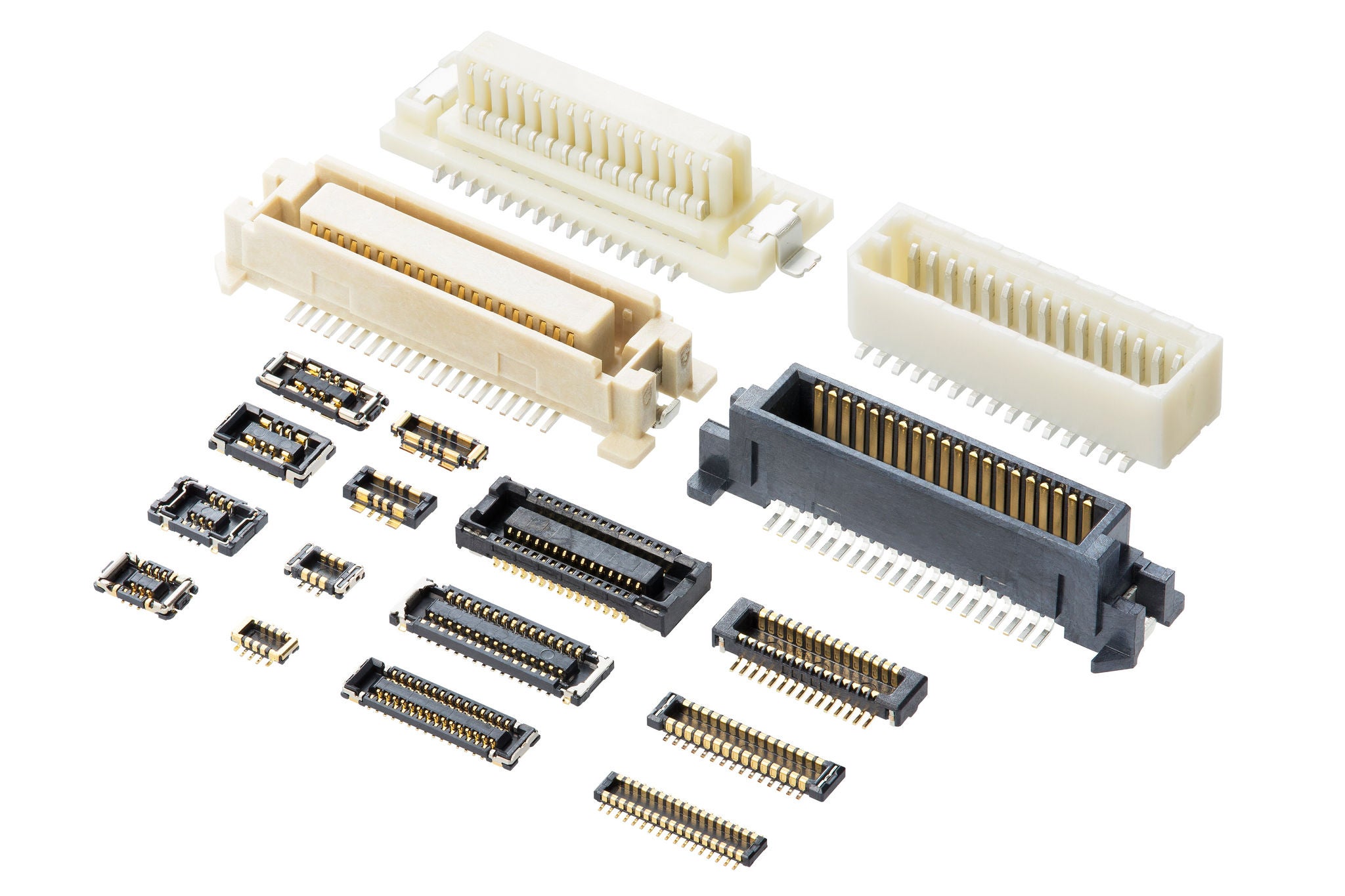
Molex 提供精心设计的互连解决方案,可优化空间利用、保障运动可靠性和实现生产一致性,从而支持这一设计路径。高密度平行板连接器有助于减小占用面积,并支持在紧凑的外形尺寸内集成先进的传感系统。柔性电缆组件和抗震接口可在数百万次运动循环后,依然保持关节处的信号和电力完整性。标准化、机器适用的互连平台能够确保质量的一致性并实现可扩展的生产。