ヒューマノイドロボット技術は、制御されたプロトタイプから実装システムの段階へと移行しつつあり、設計のトレードオフがパフォーマンスとスケーラビリティに影響を与えています。ヒューマノイドロボットが実験室のプロトタイプから産業規模のプラットフォームへと進化するに伴い、エンジニアは矛盾するアーキテクチャ要件を整合化する役目を担っています。高トルク出力をコンパクトなアクチュエータチャネルを介してルーティングすると、熱負荷が増加し、可動域の大きい関節部位ではシグナルインテグリティのリスクが生じます。こうした制約に対応するには、全方位の状況認識に必要な高密度ビジョンとLiDARセンサーを統合すると同時に、ロボットの手足駆動用の大電流を管理できるインターコネクトソリューションが必要です。多くのプラットフォームは、依然として手作りの配線や標準化されていないアセンブリーに依存しています。これにより繰り返し再現性が限定され、一つの実用プロトタイプをスケールアップして一貫した生産ユニットに展開することが難しくなっています。
こうした課題に対応するには、インターコネクト戦略の転換が必要です。高密度統合技術により、設計者は超小型の基板対基板コネクターやハイブリッドソリューションを利用して、ロボット内の限られたスペースに電力回路とデータ通信回路を収めることができます。ハイフレックスケーブルアセンブリーやポジティブロックインターフェースにより実現される動的耐久性は、連続多軸動作を可能にします。生産レベルでは、自動スケーリングにより、手作業が廃止されて機械装着可能なインターコネクトソリューションが導入されます。これにより組み立て時間が短縮され、ヒューマンエラーによるばらつきが最小化されます。
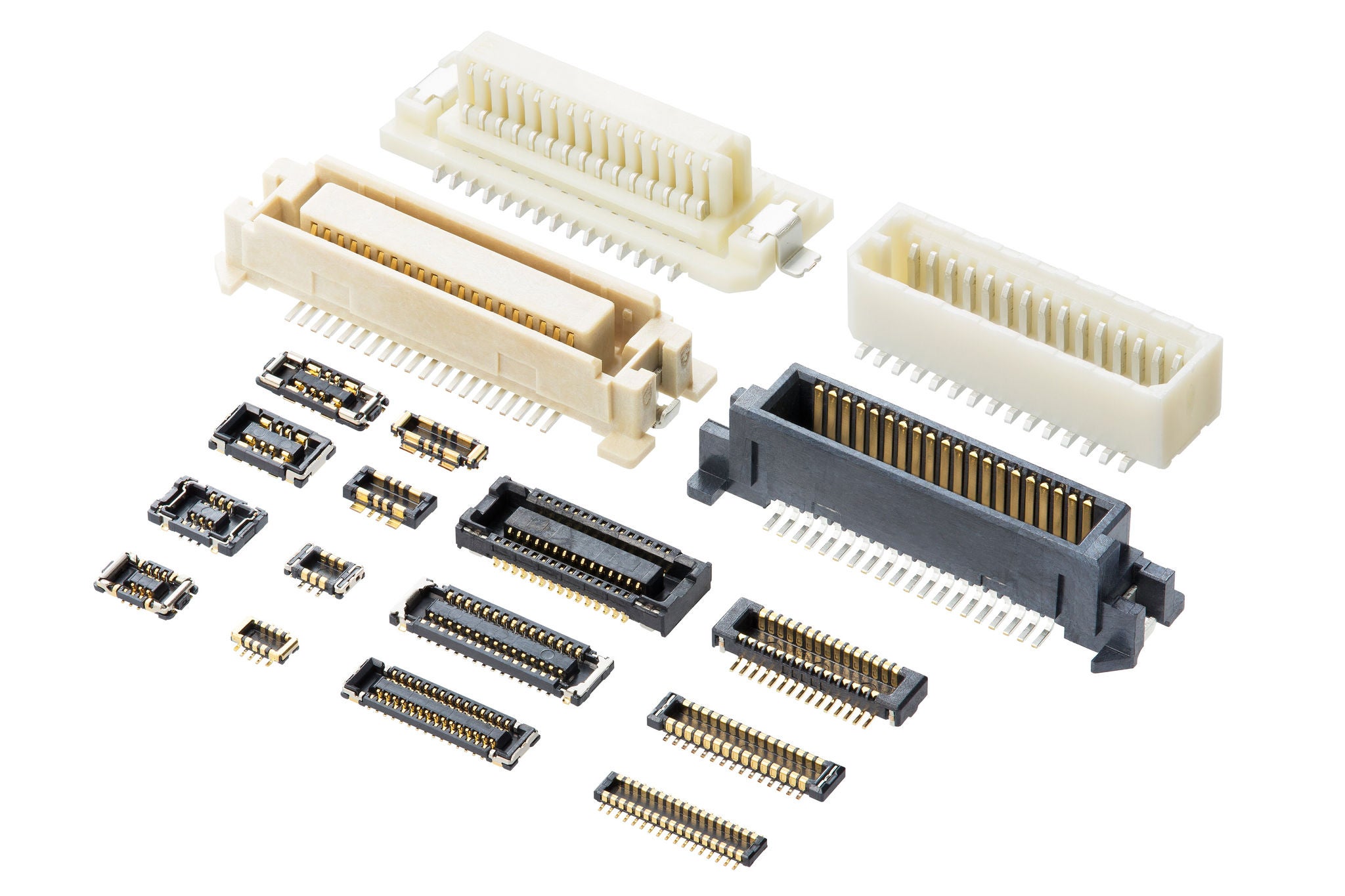
Molexは、スペース最適化・動作信頼性・生産一貫性を重視して設計されたインターコネクトソリューションの提供を通じて、こうしたアプローチをサポートします。高密度メザニンコネクターは、フットプリント縮小効果により、狭いフォームファクター内での高度な検知システムの統合を可能にします。柔軟なケーブルアセンブリーや耐振動インターフェースは、何百万回もの動作サイクルを経てもすべての関節部位で信号と電力の整合性を維持します。標準化された機械装着可能なインターコネクトプラットフォームの採用により、繰り返し再現性のある品質とスケーラブルな製造プロセスが実現されます。